Geodatenshop
Bathymetrie: Punktwolke, klassifiziert
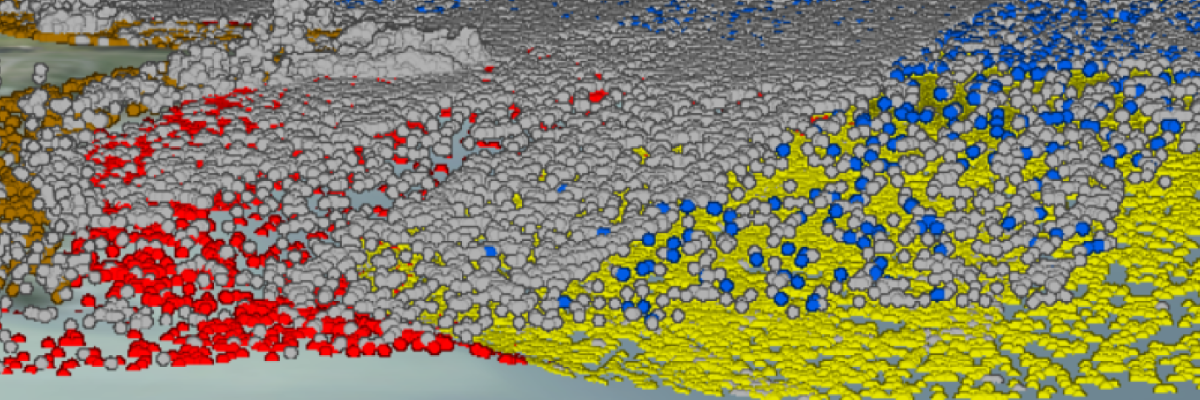
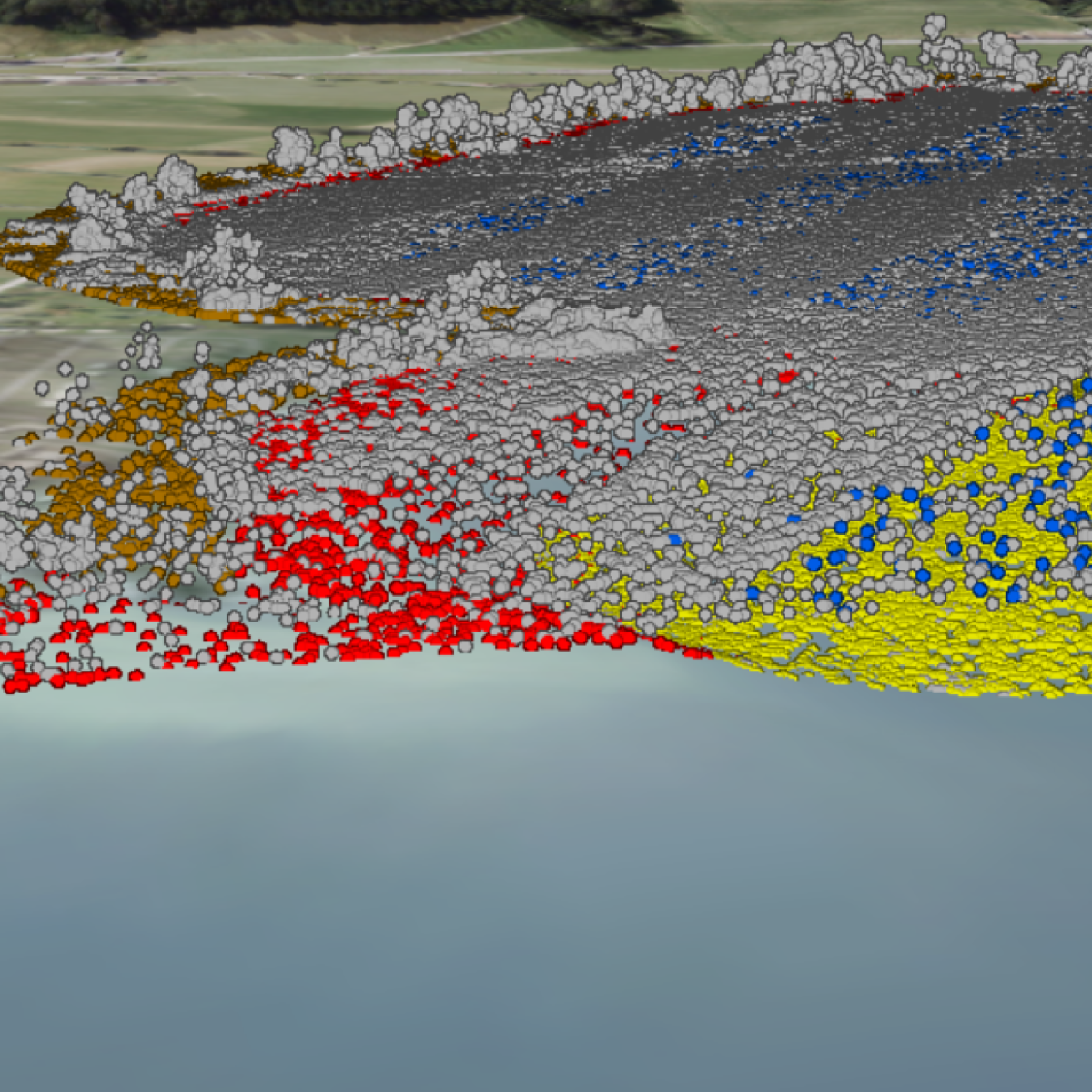
Klassifizierte Punktwolke der Bathymetrie-Daten. Die Uferbereiche (bis ca. 5m Tiefe) wurden aus der Luft mit Laserscanning (auch LiDAR = Light Detection And Ranging) erhoben. Die Tiefwasserbereiche wurden von der Wasseroberfläche mit Echolot vermessen.
Seetiefenmodell (Bathymetrie)
Der Seegrund der Seen des Kantons Luzern wurde flächendeckend vermessen. Die topographische Vermessung des Seegrunds wird als Bathymetrie bezeichnet. Daraus resultieren Bathymetrie-Daten in Form einer klassifizierten Punktwolke. Das Seetiefenmodell beschreibt das aus der Punktwolke erstellte digitale Höhenmodell (DHM) des Seebodens. Basierend auf dem digitalen Höhenmodell wurden die Seeausdehnung bzw. Wasseroberfläche, die Wassertiefe und die Tiefenlinien abgeleitet. Die Metadaten zum Seetiefenmodell geben zusätzliche Informationen über die Datengrundlage und zur Punkdichte. Dies erlaubt Aussagen über die Qualität des Seetiefenmodells.
Mögliche Anwendungsbereiche sind:
- Planung und Unterhalt von Bauwerken im und am Wasser, z.B. von Leitungen
- Navigation für Schiffe oder Taucher
- Wasserversorgung und Bewässerung: Analyse von Wasservolumen anhand von Wassertiefen und Topografie.
- Simulation von Naturereignissen wie Hochwasser- und Erdrutschprozessen
- Beschreibung der Veränderung der Unterwasserlandschaft durch Erosion, Ablagerungen und Verlandung zwecks Schutz vor Naturgefahren oder Umweltschutz
- Ökologisch relevante Informationen zu Unterwasser-Lebensräumen von Tieren und Pflanzen, z.B. Fische oder Algen.
Hinweis
Aufgrund der grossen Datenmenge empfehlen wir die Verwendung des digitalen Höhenmodells (Raster) oder der Tiefenlinien.Die klassifizierte Punktwolke wird als xyz-Datei sowie als zLAS (1.4) abgegeben.
Die Punktwolke enthält folgende Klassen:
- 1: Nicht klassifiziert
- 2: Boden (an Land)
- 6: Gebäude
- 9: Wasserkörper
- 30: Seeboden durch Multibeam Echolot erhoben
- 31: Seeboden durch LiDAR Scan erhoben
Dieser Raster-Datensatz wird in einer Datei (BATHYWLK_V1_RAS) ausgeliefert
letzte Aktualisierung dieser Seite (Stand der Metadaten): 14.03.2024